

By Zdenko Kovači
The project is a joint effort of three institutions. The University of Zagreb Faculty of Electrical Engineering and Computing is the project coordinator, and project partners are the Faculty of Agriculture of the University of Zagreb and the Institute for Marine and Coastal Research of the University of Dubrovnik. HEKTOR is a three-year project that started in March 2020. It is funded by the ESI ERDF – European Regional Development Fund.
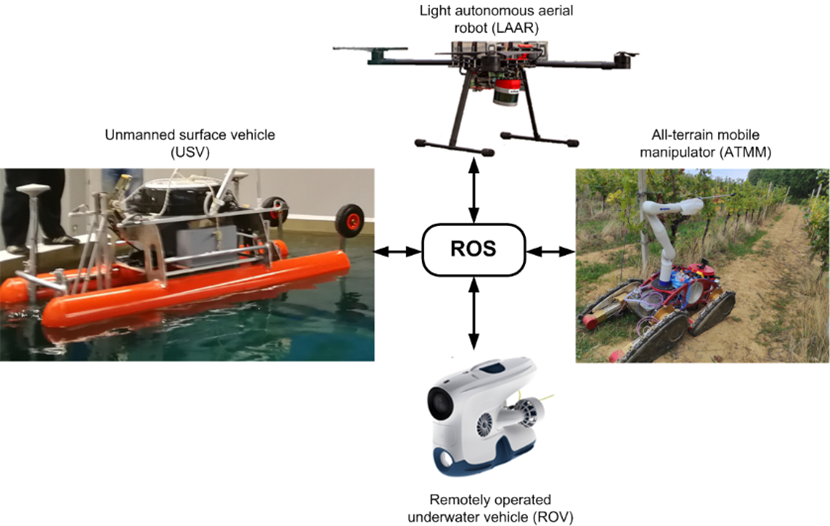
HEKTOR deals with the development of a heterogeneous robotic system for viticulture and aquaculture. The main goal of the HEKTOR project is to develop a systematic solution for the coordination of smart heterogeneous (marine, terrestrial and aerial) robots/vehicles that can autonomously cooperate and share tasks in an open, unstructured or semi-structured space. HEKTOR is designed as a modular and autonomous system tailored to different missions in the viticulture and mariculture domains, with the possibility of human intervention in different work, inspection and intervention tasks. The integration of the HEKTOR system is realised through a ROS middleware.

Aerial surveillance / mapping of a vineyard 
Selective spraying of a vineyard 
3D modelling of a steep vineyard
In viticulture, most vineyards are located in hilly terrain, which increases the amount of work required for successful growth. Many new vineyards in Mediterranean countries are now established on very steep terrain, where tasks such as spraying vines with protective vine spraying and manual suckering require extreme physical strength and endurance from workers, making these tasks particularly interesting for the implementation of robotic solutions. Desired scenarios in viticulture include vineyard surveillance, spraying and suckering based on coordinated actions of the all-terrain mobile manipulator (ATMM) and unmanned aerial vehicle (UAV).
The results of the HEKTOR project include the development of robots and subsystems that enable them to work together. For more information on the progress of the HEKTOR project, visit https://larics.fer.hr/larics/scientific_projects/hektor or see the project publications published to date:
- Hrabar, I.; Vasiljević, G.; Kovačić, Z. Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards. Electronics, Vol. 11, no. 2, 217, 2022, https://doi.org/10.3390/electronics11020217 .
- Vatavuk, I.; Vasiljević, G.; Kovačić, Z. Task Space Model Predictive Control for Vineyard Spraying with a Mobile Manipulator. Agriculture 2022, 12, 381. https://doi.org/10.3390/agriculture12030381.
- Hrabar I., Goričanec J., Kovačić Z., “Towards Autonomous Navigation of a Mobile Robot in a Steep Slope Vineyard,” 2021 44th International Convention on Information, Communication and Electronic Technology (MIPRO), 2021, pp. 1119-1124, https://doi.org/10.23919/MIPRO52101.2021.9596997 .

Zdenko Kovačić (1958) is a full professor at the University of Zagreb Faculty of Electrical Engineering and Computing and head of the Laboratory for Robotics and Intelligent Control Systems (LARICS). He has been the leader of more than 40 R&D projects with academic and industrial partners. In 2013, he received the “Fran Bošnjaković” award from the University of Zagreb for his scientific work in the fields of control, flexible automation and robotics with a focus on robot control, cooperative robotic systems, intelligent control, service robotics, humanoids and walking robots. He has co-authored 3 books on robotics, flexible manufacturing, and intelligent control, and has published more than 200 conference and journal papers. He is Associate Editor of several journals and has served on the programme committee and organising committee of major control and robotics conferences. In 2005-2010 he was the President of the Croatian Robotics Society.