
By Zihao Wang, Darren Fahey, Andrew Lucas, Andrea S. Griffin, Gregory Chamitoff, KC Wong
Bird damage to wine grapes is a significant global problem that cost the wine industry millions of dollars every year. Many bird management methods were developed to reduce damage, yet there are currently very few cost-effective solutions. Recent development of autonomous Unmanned Aerial Vehicles (UAVs) presents opportunities in using this new technology for bird management. Many researchers proposed bird management methods that utilised UAVs. However, there is very little research assessing the efficacy of these methods based upon managed trials in vineyards.
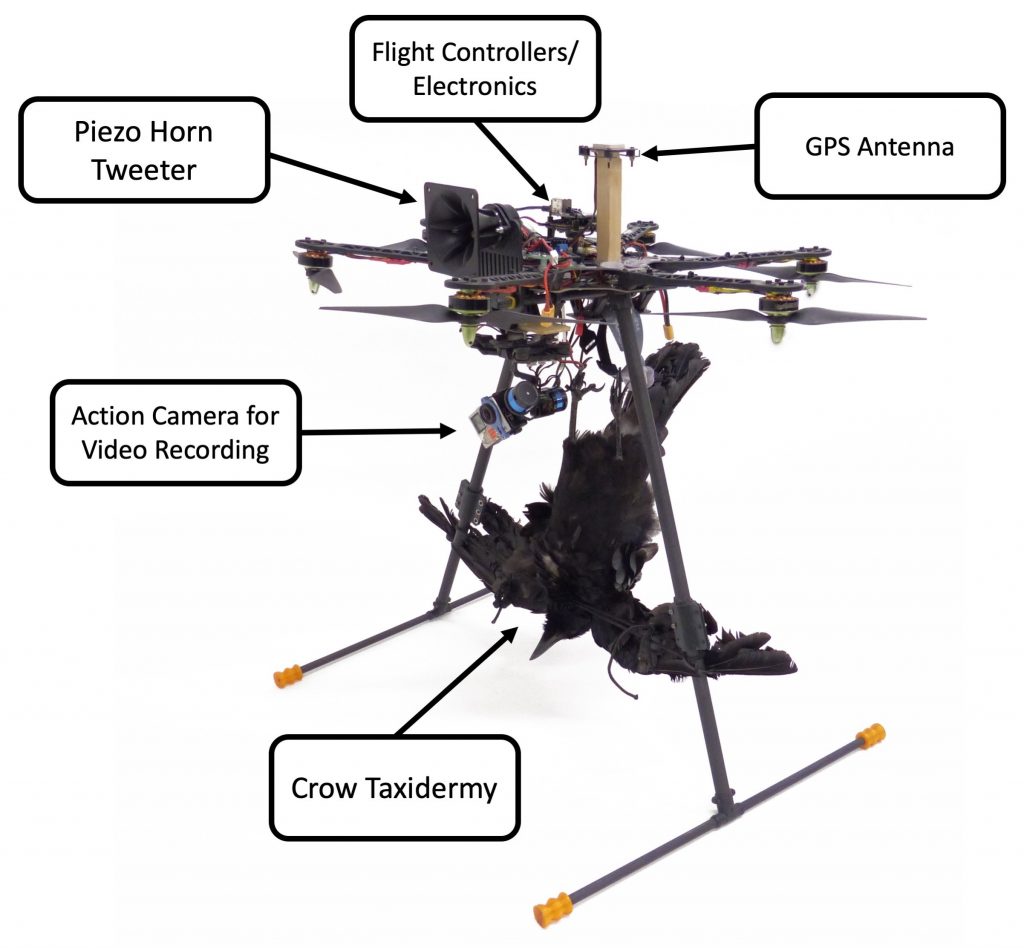
In this study (Wang et al., 2020), we investigated the efficacy of a bird psychology-incorporated UAV system (Fig. 1) previously proposed in Wang et al., 2019. The UAV system incorporated research in bird psychology to trigger and maintain anti-predator learning in birds, which differed from many off-the-shelf UAVs that only use loud noises or distress calls to scare birds. A large body of research in bird psychology indicate that birds learn about novel threats more effectively by adding additional fear-inducing stimuli to antipredator vocalisations (Griffin et al., 2010). To implement this consideration, we installed a crow taxidermy onto the UAV, as well as a speaker that broadcasted distress call. The taxidermy essentially functioned as a reinforcer for learning about new predator (Griffin & Haythorpe, 2011). We applied the UAV treatment by flying manually over the vineyard blocks with random trajectories every hour between sunrise and sunset. Each flight was at least 5 min long. Additional flights were flown when pest birds were spotted.
Two other conventional bird management methods were applied simultaneously with the UAV for comparison. These methods were netting and visual scaring using reflective devices. Experiments were repeated in three different vineyards around New South Wales, Australia. The three vineyards are located in Hunter Valley, Young and Orange. The most common species in Hunter Valley was Common Myna (Acridotheres tristis) and the overall bird activity was not very high. In Young, Silvereyes (Zosterops laterals) caused the most damage and over 100 counts of Silvereyes were observed going into and out of the vines within 15 min. Noisy Friarbird (Philemon corniculatus) was responsible for most damage in Orange, a 100-member flock was seen foraging in the vineyard daily. At all three vineyards, each method was simultaneously applied in different vineyard blocks for 7 days. We visually estimated bird damage before and after the 7-day period. The change in amount of bird damage was used to assess efficacy of each method.
To minimise influence of one treatment method on another, vineyard blocks were spatially separated from one another. We also ensured that grape variety was the same across the three vineyard blocks at each location. Furthermore, only vineyards that sustained significant and uniform bird damage (as reported by growers) in the weeks leading up to the experiment were chosen.
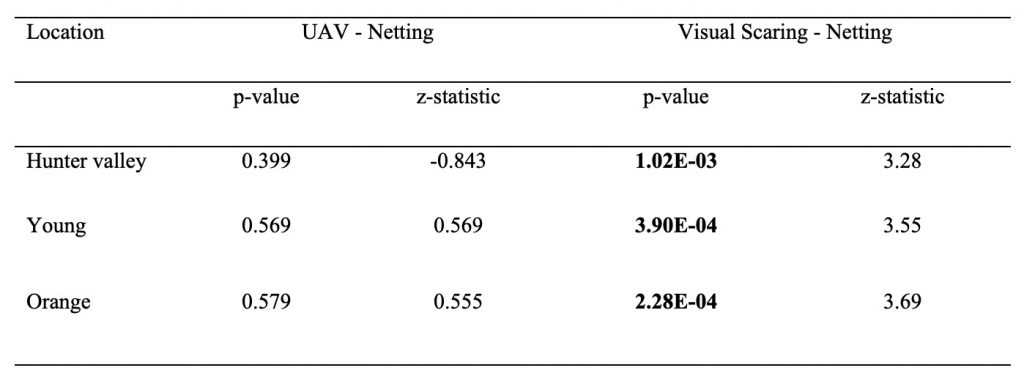
We plotted mean percentage of bird damage against each method at each location (Fig. 2). We also performed two-sided Wilcoxon-Mann-Whitney tests to determine whether the UAV method was significantly different to the netting method, and whether the visual scaring was significantly different to the netting method (Table 1). Alpha level was set at 0.05.
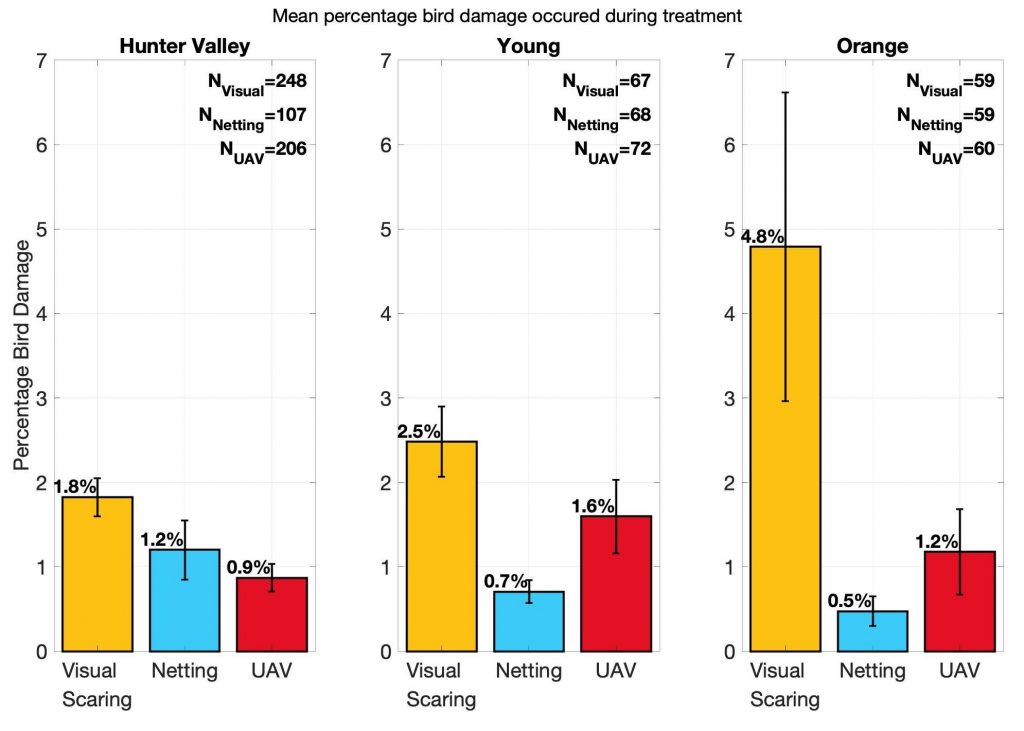
The UAV achieved the highest efficacy in Hunter Valley, with only 0.9% damage. It was followed closely by netting with 1.2%. Visual scaring performed the worst with 1.8% damage. In Young, the least damage was measured in block treated by netting (0.7%), followed by UAV (1.6%) and visual scaring (2.5%). Results from Orange was similar to Young; the least damage occurred in the netting treatment block (0.5%), followed by UAV (1.2%) and visual scaring (4.8%).
Although the UAV was not as effective as netting in two locations, the UAV outperformed netting approach by 0.3% in Hunter Valley. In addition, the statistical analyses in Table 1 suggested that the UAV method was not significantly different to netting at any of the locations. The result matched our expectation, as we showed in Wang et al., 2019 that the UAV was able to deter all of the birds within 3 min (time to prepare UAV launch and to approach birds), leaving very little time for birds to cause damage. The damage that occurred might have been caused by small-bodied birds that were difficult to spot. Other damage might have occurred while the UAV was grounded due to unsuitable weather conditions.
In contrast, visual scaring treatment performed significantly worse than netting at all three locations. This result was not surprising, because it was anticipated that the birds might have habituated to the reflective devices within 7 days.
It was possible to further improve efficacy of the UAV by using taxidermy and distress calls that match target species at each location. Frequency of the UAV flights could also be increased to four flights every hour during high bird activity.
In conclusion, we demonstrated that bird psychology-incorporated UAV had a much better efficacy than visual scaring alone at protecting wine grapes from bird damage. Relative performance between netting and the UAV also indicated the UAV had the potential to perform similarly to netting. We are working towards an autonomous version of the UAV approach to achieve better cost-effectiveness than netting. We are also exploring more effective methods at triggering and maintaining long-term anti-predator learning in target birds of different species.

Zihao Wang 
Darren Fahey 
Andrew Lucas 
Andrea S. Griffin 
KC Wong 
Zihao Wang is a PhD candidate at The University of Sydney, researching Unmanned Aerial Vehicles (UAVs) in the School of Aerospace, Mechanical and Mechatronic Engineering. He graduated from The University of Sydney in 2014 with a Bachelor of Engineering (Honours Class 1). He is interested in autonomous systems and their applications. His current focus is to develop an autonomous UAV system for bird damage management in agriculture.
Darren Fahey holds a Bachelor of Horticulture Science and Graduate Certificate in Business Management (Public Sector). He is currently employed by the Department of Primary Industries as a Development Officer in Viticulture delivering the Skills Development Program since 2015 to the NSW wine industry along with the Wine Australia Regional Program to the Greater NSW/ACT region. With over 20 years of experience in soil, compost, mulch, waste management and wine grapes, Darren has authored and co-authored numerous peer-reviewed journal articles in these fields of scientific research.
Andrew Lucas is the founder and Managing Director of AOS. AOS was established in Melbourne in 1997 as an offshoot from the Australian Artificial Intelligence Institute (affiliated with the AI Center at SRI International, Menlo Park, CA), AOS specialises in AI, autonomous and robotic systems, with major contracts for the RAAF, SASR (Special Air Services Regiment of the Australian Army), RAN, Australian Defence Department and UK Ministry of Defence. AOS has developed its own technology base of AI software, focused on intelligent software agents, combining this with other AI technologies, such as machine learning and machine vision, and constraint programming, to address a wide range of applications. Andrew holds a Ph.D. in Aeronautical Engineering from Cambridge University, United Kingdom and a Bachelor of Engineering (1st Hons) from the University of Melbourne, Australia. He has over forty years of experience in various engineering roles in aerospace & defence, management consulting, robotic systems, agricultural technology, artificial intelligence software, and telecommunications. Andrew is a board member of the Australian Association of Unmanned Systems and is a member of the Royal Aeronautical Society’s Unmanned Air Systems Specialist Group.
Dr Griffin is a behavioural ecologist with over 20 years research experience. She completed a BSc and a MSc in Switzerland, and then a PhD in Animal Behaviour at Macquarie University in 2002. She earned a Swiss National Science Foundation post-doctoral fellowship to pursue her research goals at McGill University in 2004, and then an Australian Research Council post-doctoral fellowship to work at University of Newcastle, Australia, in 2008. She holds an academic position at University of Newcastle since 2009. Griffin’s research focuses on the mechanisms and evolutionary benefits of animal behaviour. Her research is unique in that it explores the mechanisms of cognition (e.g. how animals learn) and applies accrued knowledge to solve wildlife management and conservation problems. This innovative and interdisciplinary approach, which she pioneered during her PhD, has earned Griffin a national and international reputation as a leader in behavioural ecology and animal cognition. Her research has advanced our fundamental understanding of learning in marsupial mammals and birds, improved wildlife conservation and management practices, informed policy, and generated a network of national and international collaborations and industry partnerships.
Dr KC Wong BE(Aero), PhD, AFAIAA, FRAeS. Dr KC Wong is an Associate Professor at The University of Sydney, where he is the Deputy Head of School (Education), Director of Undergraduate Coursework, and the Director for Aeronautical Engineering within the School of Aerospace, Mechanical and Mechatronic Engineering. He is a pioneering UAS (Unmanned Aircraft Systems) researcher in Australia, having been working on multidisciplinary airframe design and flight testing since 1988. He leads a small UAS research team, and has international R&D collaborations. UAS designed and developed in his group have been utilised in several industry collaborative research projects. Dr Wong was the founding President of the industry-focussed Australian Association for Unmanned Systems (AAUS), and served in that role for seven years until 2015. He has a strong passion for enhancing skills for the next generation of aerospace engineers through his development of the Aeronautical Engineering curriculum with unique experiential learning opportunities.
References:
- Griffin, A. S., Boyce, H. M., & MacFarlane, G. R. (2010). Social learning about places: observers may need to detect both social alarm and its cause to learn. Animal Behaviour, 79(2), 459–465.
- Griffin, A. S., & Haythorpe, K. (2011). Learning from watching alarmed demonstrators: does the cause of alarm matter? Animal Behaviour, 81(6), 1163–1169.
- Wang, Z., Fahey, D., Lucas, A., Griffin, A. S., Chamitoff, G., & Wong, K. C. (2020). Bird damage management in vineyards: Comparing efficacy of a bird psychology-incorporated unmanned aerial vehicle system with netting and visual scaring. Crop Protection, 137(January), 105260.
- Wang, Z., Griffin, A. S., Lucas, A., & Wong, K. C. (2019). Psychological warfare in vineyard : Using drones and bird psychology to control bird damage to wine grapes. Crop Protection, 120(September 2018), 163–170.
Interesting piece. As a former vineyard owner in Paso Robles, California, USA, I have 15 years of experience with birds. I have personally witnessed flocks of many hundreds of starlings darken the skies and then disappear into my vines. The best treatment for moving them on was to fire my 12-gauge several times over the vines. The first shot usually scared them up, the immediate second and third got them moving and the fourth and fifth usually sent them to the neighbor’s grapes. The real issue in bird control is being there when the birds are there. Since we lived on the property, it was easier for me to watch for birds, but there were many times when I missed their presence. I am certain it was the shock and concussion of the 12-gauge that sent them on their way. As the study itemized, birds attune themselves to most other automated noisemakers so as to render them ineffective. Also, I put out several human-form scarecrows dressed as vineyard workers, and purchased and flew realistic eagle and osprey kites tied permanently above the vines. Over the years, we had very little bird damage compared to neighboring vines. Whatever the method, the key is being there when they are and being irregular about what devices are employed. Almost anything is more cost-effective than netting. Thanks for listening.