

By Zihao Wang, Andrea S. Griffin, Andrew Lucas, KC Wong
Bird damage to commercial corps is a significant and long-standing global problem, and wine grapes are one the most vulnerable. In some regions of Australia, bird damage to a single vineyard can be as high as 83% (Tracey & Saunders, 2003). There are many methods developed to control bird damage in vineyards. However, there are not methods that are both efficient and cost-effective.
One of the emerging approaches to the problem is to use Unmanned Aerial Vehicles (UAVs), more commonly known as drones. As the autonomous technologies continuously improve, drones become much easier to operate. Many researchers and grape growers have attempted to use the drones to scare birds away from vineyards (Wang et al., 2017). However, the drones suffer the same limitation as other scaring methods. The birds eventually habituate to the drones after a period of time, as they have learned the drones possess no real threat. To make drones truly effective predators, we need to incorporate considerations of bird psychology into the design.
Decades of research in bird psychology suggest that birds learn about new predators by listening to the distress calls of their conspecifics (Conover & Perito, 1981; Griffin, 2008). Distress call is typically produced by a bird that has been captured by a predator. When birds experience new threats together with distress calls, they learn to associated the new threats with danger (Griffin, 2004). Furthermore, a large body of research indicates that the effectiveness of such learning can be increased in amplitude and duration by adding fear-inducing stimuli to the calls themselves (Griffin et al., 2010).
In Wang et al., 2019, we took this theory to the test by equipping a hexacopter multirotor drone with a piezo horn tweeter and a crow taxidermy, as shown in figure 1, and test the response of the pest birds to the multirotor in different vineyards. The horn tweeter and the crow taxidermy were responsible for generating the perceived predation risk. The horn tweeter broadcasted bird distress calls. The crow taxidermy was installed upside down, wings open, in a vertical pose on the undercarriage of the drone. The intention of this pose was to strike the impression that the UAV has just caught the crow, and the distress call was coming from the crow in apparent danger.

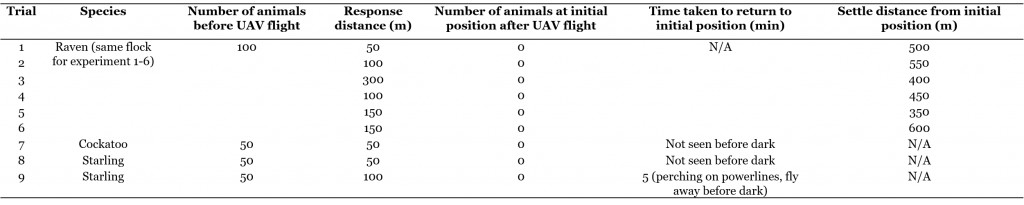
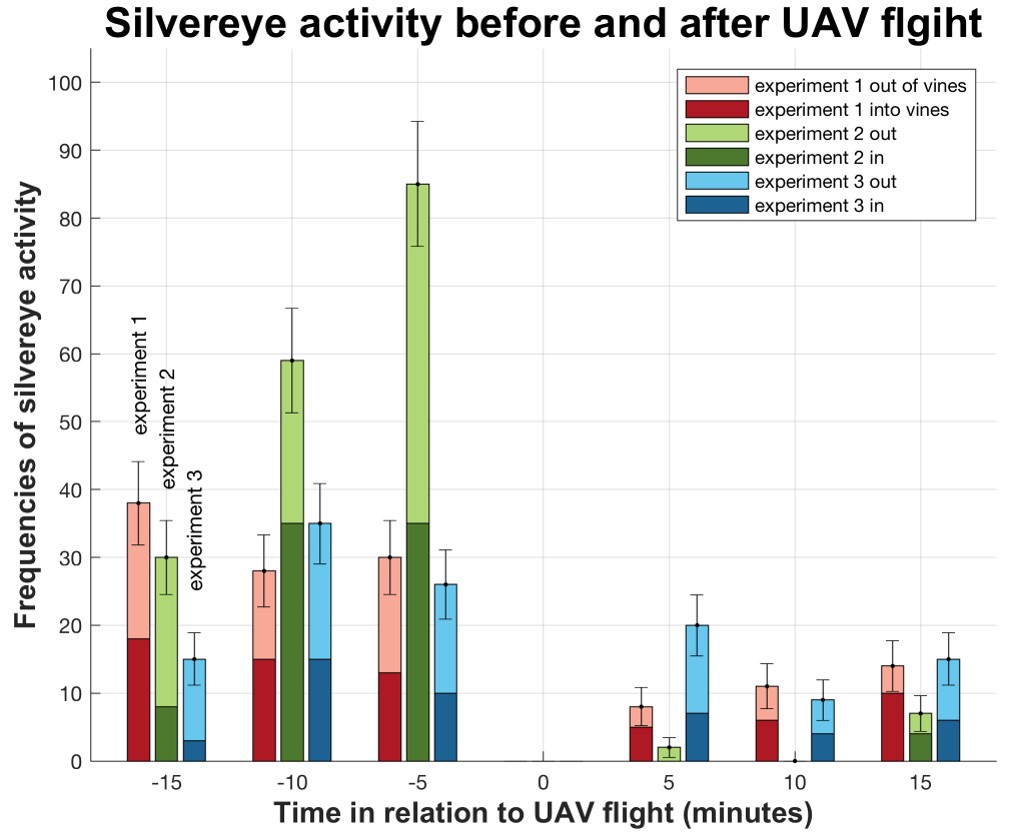
The drone was tested across 4 different vineyards in 2018 in New South Wales, Australia. The main avian pest species encountered during the experiments were the Australian Raven (Corvus coronoides), Common Starling (Sturnus vulgaris), Sulphur-crested Cockatoo (Cacatua galerita) and Silvereye (Zosterops lateralis). The drone was flown manually to deter pest birds found in the vineyards. For flocking birds (ravens, starlings and cockatoos in the experiments), we observed and recorded the distance at which birds fled from the drone, and the time taken for the birds to return to their initial position. For the silvereyes, because of their very different behaviours, we counted the bird activities 15 min before and 15 min after drone flights as a measure of effectiveness.
In 9 successful trials targeted at flocking birds, all birds fled from the drone with no birds left behind (Table 1). On average, the birds responded to the drone when it was around 100 m away from them. The ravens did not leave the vineyard after the drone flights, they settled on average 450 m away from the position which they fled from. On the other hand, the cockatoo and starling flocks left the vineyard after the drone flight. Only the starling flock in trial 9 returned to the vineyard after 5 min, however they stayed perching on powerlines briefly before they flew away.
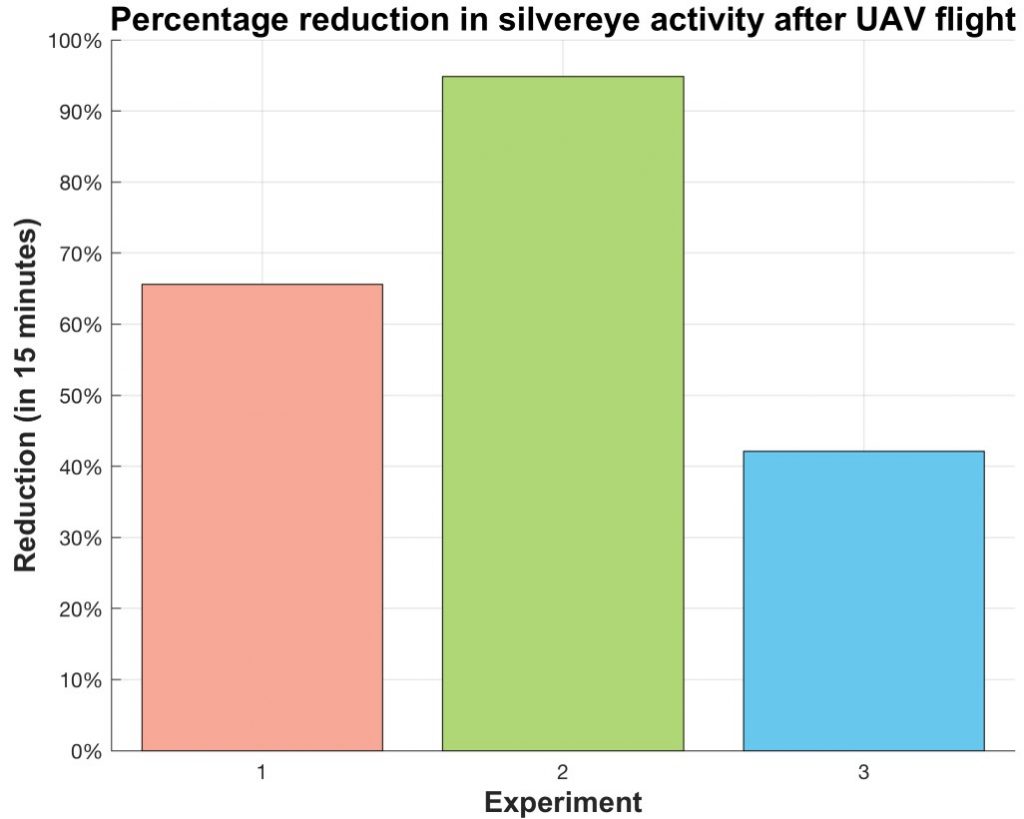
The silvereye activities recorded in the experiments can be seen in figure 2 and figure 3. A total of 3 experiments were performed. Figure 2 shows that the number of birds moving into and out of the vines after the drone flight dropped significantly compared to before the drone flight. The relative reduction of bird activity 15 min after the UAV flight were 66%, 95% and 42% (figure 3).
The results indicated strongly that the drone was an effective bird deterrent for the target pest birds. The drone had a minimum 50 m radius of influence on large birds. More importantly, this radius of influence has a moving centre, which effectively increased the radius of influence to the drone’s radius of action plus 50 m. In addition, 100% of the birds left the initial location after the drone flight during the 9 trials. Only one flock of starling returned but they did not return to forage in the vines. The effectiveness of drone against silvereyes is evident in the reduction of silvereye activities after the flights.
In conclusion, incorporating bird psychology into the design of a drone opens new avenues for the development of bird control methods. Drone can potentially eliminate bird damage, provided the drone can target the birds and take off as soon as the birds have arrived at the vineyard. Therefore, autonomous technologies are keys to make drones efficient bird management tools in the future. We are aiming to develop path planning algorithms and sensor technologies in the future to achieve this goal.
Those interested in a longer length report can download the working paper at:
https://www.sciencedirect.com/science/article/pii/S0261219419300717

Zihao Wang is a PhD candidate at The University of Sydney, researching Unmanned Aerial Vehicles (UAVs) in the School of Aerospace, Mechanical and Mechatronic Engineering. He graduated from The University of Sydney in 2014 with a Bachelor of Engineering (Honours Class 1). He is interested in autonomous systems and their applications. His current focus is to develop an autonomous UAV system for bird damage management in agriculture.

Dr Andrea Griffin is a zoologist and expert in Animal Cognition. She is interested in how animals adapt to changing environments via learning and evolution. She has developed methods for training endangered animals to recognise predators and has studied how invasive birds learn about predators, humans, places and traps. Her research makes important contributions to conservation and management of wild animal populations.

Andrew Lucas is the founder and Managing Director of AOS. AOS was established in Melbourne in 1997 as an offshoot from the Australian Artificial Intelligence Institute (affiliated with the AI Center at SRI International, Menlo Park, CA), AOS specialises in AI, autonomous and robotic systems, with major contracts for the RAAF, SASR (Special Air Services Regiment of the Australian Army), RAN, Australian Defence Department and UK Ministry of Defence.
AOS has developed its own technology base of AI software, focused on intelligent software agents, combining this with other AI technologies, such as machine learning and machine vision, and constraint programming, to address a wide range of applications.
Andrew holds a Ph.D. in Aeronautical Engineering from Cambridge University, United Kingdom and a Bachelor of Engineering (1st Hons) from the University of Melbourne, Australia. He has over forty years of experience in various engineering roles in aerospace & defence, management consulting, robotic systems, agricultural technology, artificial intelligence software, and telecommunications.
Andrew is a board member of the Australian Association of Unmanned Systems and is a member of the Royal Aeronautical Society’s Unmanned Air Systems Specialist Group.

Dr KC Wong is an Associate Professor at The University of Sydney, where he is the Deputy Head of School (Education), Director of Undergraduate Coursework, and the Director for Aeronautical Engineering within the School of Aerospace, Mechanical and Mechatronic Engineering. He is a pioneering UAS (Unmanned Aircraft Systems) researcher in Australia, having been working on multidisciplinary airframe design and flight testing since 1988. He leads a small UAS research team, and has international R&D collaborations. UAS designed and developed in his group have been utilised in several industry collaborative research projects. Dr Wong was the founding President of the industry-focussed Australian Association for Unmanned Systems (AAUS), and served in that role for seven years until 2015. He has a strong passion for enhancing skills for the next generation of aerospace engineers through his development of the Aeronautical Engineering curriculum with unique experiential learning opportunities.
References
- Conover, M. R., & Perito, J. J. (1981). Response of Starlings to Distress Calls and Predator Models Holding Conspecific Prey. Zeitschrift Für Tierpsychologie, 57(2), 163–172.
- Griffin, A. S. (2004). Social learning about predators: a review and prospectus. Animal Learning & Behavior, 32(1), 131–140.
- Griffin, A. S. (2008). Social learning in Indian mynahs, Acridotheres tristis: the role of distress calls. Animal Behaviour, 75(1), 79–89.
- Griffin, A. S., Boyce, H. M., & MacFarlane, G. R. (2010). Social learning about places: observers may need to detect both social alarm and its cause to learn. Animal Behaviour, 79(2), 459–465.
- Tracey, J., & Saunders, G. (2003). Bird Damage to the Wine Grape Industry. New South Wales, Australia: Australian Government Bureau of Rural Sciences.
- Wang, Zihao; Lucas, Andrew; Wong, KC and Charmitoff, G. (2017). Biomimetic design for pest bird control UAVs: A survey. In 17th Australian International Aerospace Congress : AIAC 2017. Melbourne, Vic.: Engineers Australia, Royal Aeronautical Society, 2017: 469-476. Availability: <http://search.informit.com.au/documentSummary;dn=739410642199086;res=IELENG> ISBN: 9781922107855. (pp. 26–28).
- Wang, Z., Griffin, A. S., Lucas, A., & Wong, K. C. (2019). Psychological warfare in vineyard: Using drones and bird psychology to control bird damage to wine grapes. Crop Protection, 120.